FAIRINO FR3 Desktop Collaborative Robot Training Platform with Pneumatic Gripper
FAIRINO FR3 Desktop Collaborative Robot Training Platform with Pneumatic Gripper
FAIRINO FR3 Desktop Collaborative Robot Training Platform for Robotics Education
This desktop collaborative robot training platform is designed for robotics education, automation training, vocational schools, technical colleges, university laboratories, and industrial training programs.
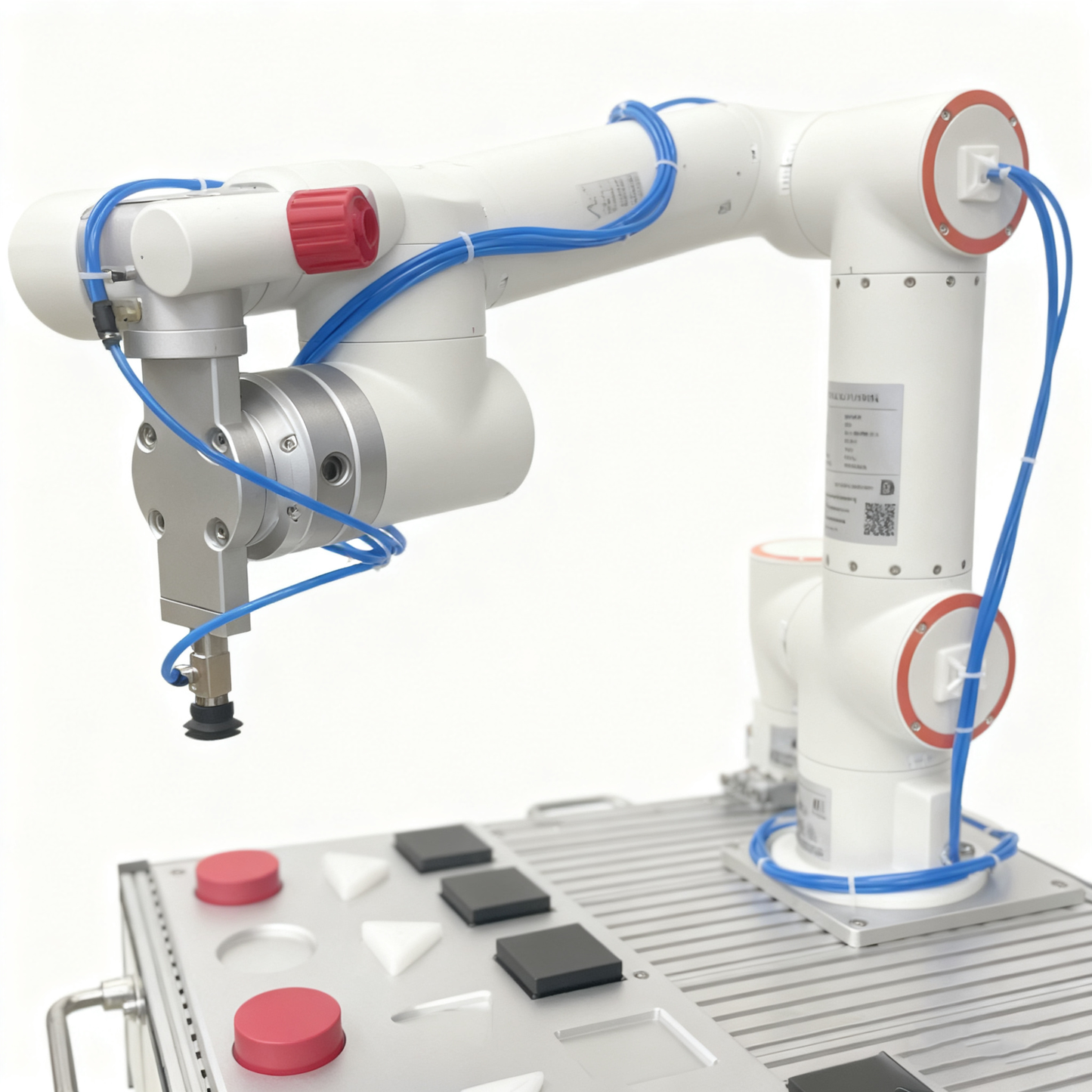
The system uses a FAIRINO FR3 6-axis collaborative robot with a pneumatic gripper / end-effector for pick-and-place and workpiece handling exercises. It is suitable for teaching basic robot operation, point teaching, coordinate systems, motion path control, digital I/O control, and pneumatic gripper applications.
This product is not a fully pneumatic robot arm. The robot arm itself is an electric collaborative robot. The pneumatic system is used for the gripper / end-effector.
Robot Model and Key Specifications
-
Robot model: FAIRINO FR3
-
Robot type: 6-axis collaborative robot
-
Rated payload: 3 kg
-
Maximum payload: up to 5 kg under extended-load conditions
-
Working radius / reach: 622 mm
-
Repeatability: ±0.02 mm
-
Typical TCP speed: 1 m/s
-
Programming interface: 10.1-inch teach pendant or mobile terminal Web App
-
Tool I/O: DI 2 / DO 2, AI 1 / AO 1
-
Tool power supply: 24V / 1.5A
-
Robot weight: approx. 15 kg without cable
What Students Can Learn
This training platform helps students understand and practice:
-
Collaborative robot basic operation
-
Robot point teaching and programming
-
Joint coordinate and Cartesian coordinate systems
-
TCP and tool coordinate setup
-
Motion path planning
-
Pick-and-place operation
-
Workpiece handling exercises
-
Pneumatic gripper open / close control
-
Digital I/O control
-
Basic robot automation process training
-
Human-machine collaboration demonstration
Pneumatic Gripper Control
The pneumatic gripper is driven by compressed air and controlled through a solenoid valve. The solenoid valve can be controlled by the robot controller’s digital output signals, allowing the robot program to control both the arm movement and the opening / closing of the gripper.
A compressed air supply is required for the pneumatic gripper. Please contact us if you need help confirming the air supply configuration.
PLC Information
A PLC is not included in this standard version. The robot arm is controlled by its own robot controller and robot programming / teaching software.
We also offer similar training products that combine PLC control with robotic arm operation. If you are interested in PLC and robotic arm integration training, we can send you more information about those options.
Suitable For
-
Robotics education
-
STEM and engineering laboratories
-
Vocational and technical training
-
University automation courses
-
Industrial robot training
-
Collaborative robot demonstration
-
Pick-and-place automation practice
-
Factory automation teaching
Important Notes
-
This is a desktop collaborative robot training platform, not a pneumatic robot arm.
-
The pneumatic part refers to the gripper / end-effector.
-
PLC is not included in the standard version.
-
Compressed air is required for the pneumatic gripper.
-
Please contact us before ordering if you need a specific voltage, plug type, air compressor, training curriculum, or PLC-integrated robot training solution.
Couldn't load pickup availability